Breadth-first search
[danger] The version on the website may not be compatible with the code presented here.
This will be fixed in the near future.
[info] Copying the code
If you want to copy-paste the example below, you should get them from the source, as it will preserve the indentation.
In the previous section, we used a breadth-first search algorithm to visit an entire world. This is not particularly useful. A better use case is for finding a path between two nodes, which we call start and goal. All that is required is to add a test to see if we have found the goal, and quit at that point. To make the code clearer, we encapsulate the algorithm in a function whose name ends with _v1 to indicate that this is only a first version.
from search_tools import Deque, Graph
no_highlight()
def find_goal_bfs_v1(start, goal, graph):
'''Starting from the *start* node, uses a breadth-first search
algorithm to explore a world until the *goal* node is found.
'''
frontier = Deque()
frontier.append(start)
visited = set([start])
while not frontier.is_empty():
current = frontier.get_first()
for neighbour in graph.neighbours(current):
if neighbour not in visited:
frontier.append(neighbour)
visited.add(neighbour)
if neighbour == goal: # <-- new test added
return
frontier.mark_done(current)
# set up
World("Empty")
think(0)
RUR.set_world_size(10, 10)
start = 3, 3
goal = 6, 4
RUR.add_object("star", *goal)
graph = Graph()
find_goal_bfs_v1(start, goal, graph)
Instead of checking if we have reached the goal when we select a node from the frontier, we could do it when we add a neighbour to the set of visited nodes. This would work here but would be guaranteed to yield the best possible path when we introduce a cost function later on.
Getting the path
So far the algorithm as implemented explores the world until the goal is found, but it does not give a path to follow. This can be remedied by a simple change. As usual, we follow fairly closely the notation from Red Blob Games.
Instead of using a set for recording the visited nodes, we use a dict whose keys are nodes and corresponding values are nodes that were immediately visited before; we call this dict came_from, and note the relevant line changes below by the comments labeled 1a, 1b, and 1c. We also add the option of not using colour to show the visited nodes (comments 2a and 2b). Finally, we return the came_from dict (comment 3).
def find_goal_bfs_v2(start, goal, graph):
'''Starting from the *start* node, uses a breadth-first search
algorithm to explore a world until the *goal* node is found,
recording the nodes visited along the way.
'''
frontier = Deque(no_colors=no_colors) # 2b
frontier.append(start)
came_from = {start: None} # 1a
while not frontier.is_empty():
current = frontier.get_first()
for neighbour in graph.neighbours(current):
if neighbour not in came_from: # 1b
frontier.append(neighbour)
came_from[neighbour] = current # 1c
if neighbour == goal:
return came_from # 3
frontier.mark_done(current)
The path can be reconstructed using the came_from dict as follows:
current = goal
path = []
while current != start:
path.append[current]
current = came_from[current]
path.append[start]
And here's a full program that can find a path, and show it in colours at the end.
from search_tools import Deque, Graph
no_highlight()
def find_goal_bfs_v2(start, goal, graph, no_colors=False):
'''Starting from the *start* node, uses a breadth-first search
algorithm to explore a world until the *goal* node is found,
recording the nodes visited along the way.
'''
frontier = Deque(no_colors=no_colors)
frontier.append(start)
came_from = {start: None}
while not frontier.is_empty():
current = frontier.get_first()
for neighbour in graph.neighbours(current):
if neighbour not in came_from:
frontier.append(neighbour)
came_from[neighbour] = current
if neighbour == goal:
return came_from
frontier.mark_done(current)
# set-up
World("Empty")
think(0)
RUR.set_world_size(10, 10)
goal = 9, 9
start = 3, 3
RUR.add_object("star", *goal)
reeborg = UsedRobot(*start)
reeborg.set_model("yellow")
graph = Graph()
# do the search; do not use colors to indicate the search
# so that we can focus on the final result
came_from = find_goal_bfs_v2(start, goal, graph, no_colors=True)
# obtain path from search result
current = goal
path = []
while current != start:
path.append(current)
current = came_from[current]
path.append(start)
# draw the path
for node in path:
RUR.add_colored_tile("green", *node)
Since we select the neighbours of a given node in a random order by default, the path found may vary each time the program is executed. Here's one possible final result:
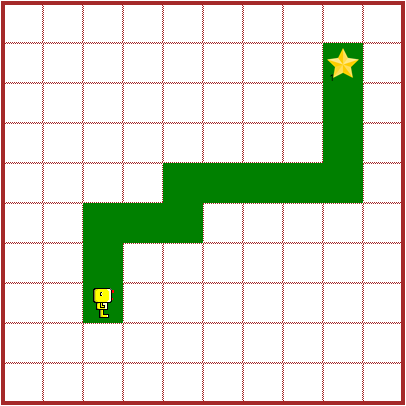
And here is an animation showing the search done and the corresponding path drawn:
Make Reeborg follow the path
In Reeborg's World, what we are usually interested in is not to draw a path that Reeborg can follow but actually make Reeborg move along a given path. This is easily accomplished if we replace
path.append(start)
# draw the path
for node in path:
RUR.add_colored_tile("green", *node)
by
path.reverse() # we don't need "start" in reverse path
for node in path:
while node != reeborg.position_in_front():
reeborg.turn_left()
reeborg.move()
Below is an image showing the final result. In addition to the above changes, we have also:
- removed
reeborg.set_model("yellow"), to use the default robot model; - replaced
RUR.add_object("star", *goal)byRUR.add_final_position("house", *goal)so that there would be an automatic verification done at the end, confirming that we have reached the goal.
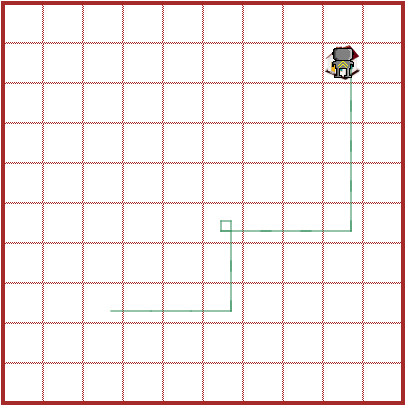
And here is the final program in its entirety
from search_tools import Deque, Graph
no_highlight()
def find_goal_bfs_v2(start, goal, graph, no_colors=False):
'''Starting from the *start* node, uses a breadth-first search
algorithm to explore a world until the *goal* node is found,
recording the nodes visited along the way.
'''
frontier = Deque(no_colors=no_colors)
frontier.append(start)
came_from = {start: None}
while not frontier.is_empty():
current = frontier.get_first()
for neighbour in graph.neighbours(current):
if neighbour not in came_from:
frontier.append(neighbour)
came_from[neighbour] = current
if neighbour == goal:
return came_from
frontier.mark_done(current)
# set-up
World("Empty")
think(0)
RUR.set_world_size(10, 10)
goal = 9, 9
start = 3, 3
RUR.add_final_position("house", *goal)
reeborg = UsedRobot(*start)
graph = Graph()
# do the search; do not use colors to indicate the search
# so that we can focus on the final result
came_from = find_goal_bfs_v2(start, goal, graph, no_colors=True)
# obtain path from search result
current = goal
path = []
while current != start:
path.append(current)
current = came_from[current]
path.reverse()
for node in path:
while node != reeborg.position_in_front():
reeborg.turn_left()
reeborg.move()
[info] Observation
Although all paths found will the same number of
move()instructions required to reach the goal, most of them will require many extraturn_left()instructions and thus will not be the most efficient from Reeborg's point of view.